 DMfD overview
DMfD overview
Abstract
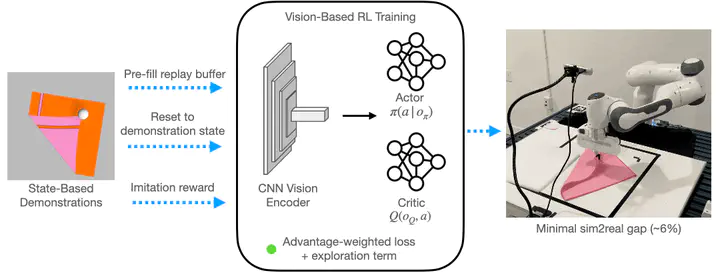
We present a novel Learning from Demonstration (LfD) method, Deformable Manipulation from Demonstrations (DMfD), to solve deformable manipulation tasks using states or images as inputs, given expert demonstrations. Our method uses demonstrations in three different ways, and balances the trade- off between exploring the environment online and using guid- ance from experts to explore high dimensional spaces effectively. We test DMfD on a set of representative manipulation tasks for a 1-dimensional rop e and a 2-dimensional cloth from the SoftGym suite of tasks, each with state and image observations. Our method exceeds baseline performance by up to 12.9% for state-based tasks and up to 33.44% on image-based tasks, with comparable or better robustness to randomness. Additionally, we create two challenging environments for folding a 2D cloth using image-based observations, and set a performance benchmark for them. We deploy DMfD on a real robot with a minimal loss in normalized performance during real-world execution compared to simulation (∼ 6%). Source code is on github.com/uscresl/dmfd.
See project website for more information.